Cu totii avem diverse locomotive, unele mai "capabile" ca altele in a tracta garnituri de diferite lungimi, pe trasee cu variate gradiente de panta. Desi exista o corelatie directa intre forta de tractiune si greutatea locomotivei, numarul de osii motoare, prezenta sau absenta cauciucurilor de tractiune, puterea motorului electric folosit etc., surprizele nu sunt putine.
Fara sa urmaresc neaparat o aplicabilitate practica imediata, ci fiind mai degraba un exercitiu - sa zicem - (auto)didactic, am cautat o metoda prin care sa determin cat mai precis posibil forta de tractiune a locomotivelor si care sa imi permita o comparatie directa intre acestea.
Studiind diferite idei pe net, am ajuns la concluzia ca folosirea unui cantar digital se impune ca o necesitate, cel putin pentru comoditatea citirilor. O pleiada de idei interesante am gasit aici: https://cs.trains.com/mrr/f/88/p/286791/3318911.aspx dar in testele mele valorile citite erau "all over the place" fara posibilitatea de a ajunge la rezultate definitive.
Am incercat apoi un cantar mai sensibil (500g) pozitionat vertical, locomotivele impingand talerul. Rezultatele au fost ceva mai bune, dar complicate de dificultatea fixarii cantarului la verticala. In plus, a devenit evident faptul ca nici softul intern al cantarului nu apreciaza zbuciumul locomotivei care patineaza pe sine. Venise momentul sa incerc o alta abordare:


Fara prea multe remuscari, am "canibalizat" minicantarul digital pentru a extrage senzorul din interior si a-l folosi fara nicio jena cu montajul meu. Nu stiam mai nimic despre modul de functionare al "celulelor de incarcare" dar netul imi este bun prieten. https://instrumentationtools.com/load-cell-working-principle/


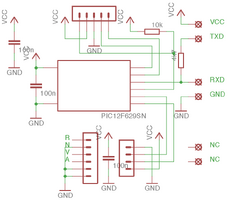
Semnalul generat de aceste celule de incarcare (practic un circuit punte Wheatstone) este extrem de mic si necesita o amplificare semnificativa (128x) inainte a fi convertit digital. Ambele etape sunt efectuate de un circuit integrat dedicat (HX711). Datele digitale furnizate sunt preluate de microcontroller-ul PIC16F677, procesate si trimise spre display-ul LCD 1602.



Software-ul intern al PIC-ului citeste forta de apasare de 10 ori pe secunda. La punerea sub tensiune este apelata o rutina de autocalibrare, dupa care softul intra in stand-by, asteptand forte de apasare de peste 1g. Locomotiva este rulata la viteza minima; din momentul in care apasa pe senzor, se efectueaza serii de cate 8 citiri (0,8 sec.) si se memoreaza valorile medie si maxima. Dupa 12 serii (9,6 sec.), sunt alese si afisate cele mai mari valori ale fortelor de apasare medii si maxime. Apasarea microswitch-ului permite alegerea unitatii de masura (grame sau Newton).


Precizia interna a software-ului este de 0,1g iar acuratetea de +/- 0,5g. Iata cateva valori:
Taurus Railjet Piko Expert


BR 147 Piko Expert


ICE3 BordBistro Piko Hobby


P&T 07-16 Bachmann UK (clona Liliput fara cauciucuri de tractiune)


Sincer, ma asteptam poate la diferente mai mari intre valorile maxime si cele medii, in ideea ca valorile medii reprezinta tractiunea in timpul patinarii iar cele maxime ar sugera punctul de pierdere al aderentei si inceperea patinarii.
Fara sa urmaresc neaparat o aplicabilitate practica imediata, ci fiind mai degraba un exercitiu - sa zicem - (auto)didactic, am cautat o metoda prin care sa determin cat mai precis posibil forta de tractiune a locomotivelor si care sa imi permita o comparatie directa intre acestea.
Studiind diferite idei pe net, am ajuns la concluzia ca folosirea unui cantar digital se impune ca o necesitate, cel putin pentru comoditatea citirilor. O pleiada de idei interesante am gasit aici: https://cs.trains.com/mrr/f/88/p/286791/3318911.aspx dar in testele mele valorile citite erau "all over the place" fara posibilitatea de a ajunge la rezultate definitive.
Am incercat apoi un cantar mai sensibil (500g) pozitionat vertical, locomotivele impingand talerul. Rezultatele au fost ceva mai bune, dar complicate de dificultatea fixarii cantarului la verticala. In plus, a devenit evident faptul ca nici softul intern al cantarului nu apreciaza zbuciumul locomotivei care patineaza pe sine. Venise momentul sa incerc o alta abordare:
Fara prea multe remuscari, am "canibalizat" minicantarul digital pentru a extrage senzorul din interior si a-l folosi fara nicio jena cu montajul meu. Nu stiam mai nimic despre modul de functionare al "celulelor de incarcare" dar netul imi este bun prieten. https://instrumentationtools.com/load-cell-working-principle/
Semnalul generat de aceste celule de incarcare (practic un circuit punte Wheatstone) este extrem de mic si necesita o amplificare semnificativa (128x) inainte a fi convertit digital. Ambele etape sunt efectuate de un circuit integrat dedicat (HX711). Datele digitale furnizate sunt preluate de microcontroller-ul PIC16F677, procesate si trimise spre display-ul LCD 1602.
Software-ul intern al PIC-ului citeste forta de apasare de 10 ori pe secunda. La punerea sub tensiune este apelata o rutina de autocalibrare, dupa care softul intra in stand-by, asteptand forte de apasare de peste 1g. Locomotiva este rulata la viteza minima; din momentul in care apasa pe senzor, se efectueaza serii de cate 8 citiri (0,8 sec.) si se memoreaza valorile medie si maxima. Dupa 12 serii (9,6 sec.), sunt alese si afisate cele mai mari valori ale fortelor de apasare medii si maxime. Apasarea microswitch-ului permite alegerea unitatii de masura (grame sau Newton).
Precizia interna a software-ului este de 0,1g iar acuratetea de +/- 0,5g. Iata cateva valori:
Taurus Railjet Piko Expert
BR 147 Piko Expert
ICE3 BordBistro Piko Hobby
P&T 07-16 Bachmann UK (clona Liliput fara cauciucuri de tractiune)
Sincer, ma asteptam poate la diferente mai mari intre valorile maxime si cele medii, in ideea ca valorile medii reprezinta tractiunea in timpul patinarii iar cele maxime ar sugera punctul de pierdere al aderentei si inceperea patinarii.